
私たちが何気なくコーヒーカップに手を伸ばすとき、その軌道は驚くほど滑らかです。しかし、この一見単純な動作の裏側には、計算機科学者をも絶望させるような複雑な「計算」が隠されています。人間の身体には数百の筋肉とそれらを制御する膨大な数の神経細胞が存在し、いわば「自由度の塊」です。
かつてニコライ・ベルンシュタインが提唱した「自由度の問題」は、このあまりに多すぎる選択肢を脳がいかにして束ねているのかという問いを私たちに突きつけました。その問いに対する現代の最も洗練された回答の一つが、今回ご紹介するOptimal Feedback Control、すなわち最適フィードバック制御理論です。
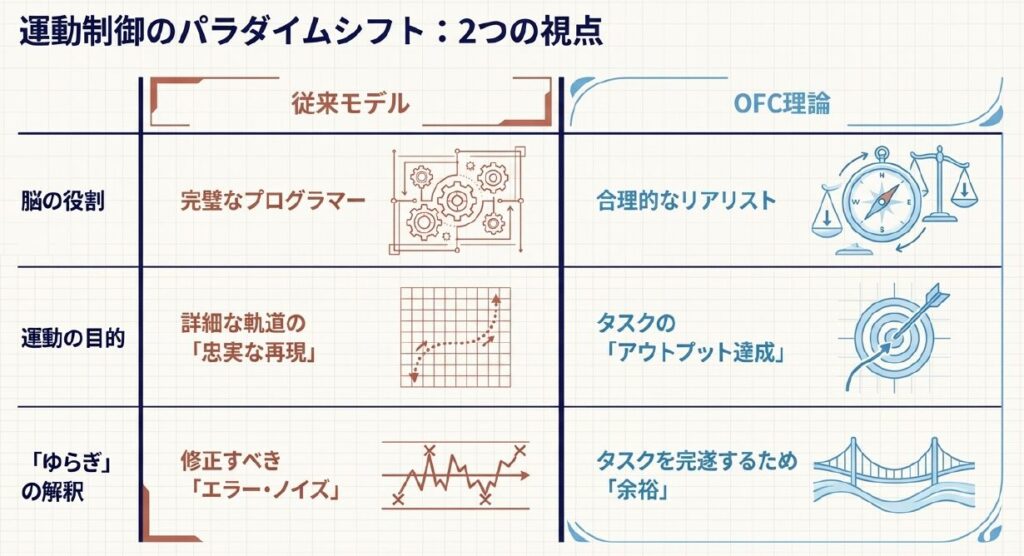
この理論がこれまでの運動制御論と一線を画すのは、脳を「完璧なプログラマー」としてではなく、極めて「合理的なリアリスト」として捉えている点にあります。かつての運動制御モデルでは、脳はあらかじめ詳細な運動軌道を描き、それを忠実に再現しようとすると考えられてきました。しかし、現実の私たちの動きを詳細に観察すると、軌道そのものは実行するたびに微妙に揺らいでいます。それにもかかわらず、最終的な目的である「カップを掴む」というタスクの成功率は極めて高いのです。ここに、脳が採用している「アウトプットドリブン」な制御の本質が隠されています。

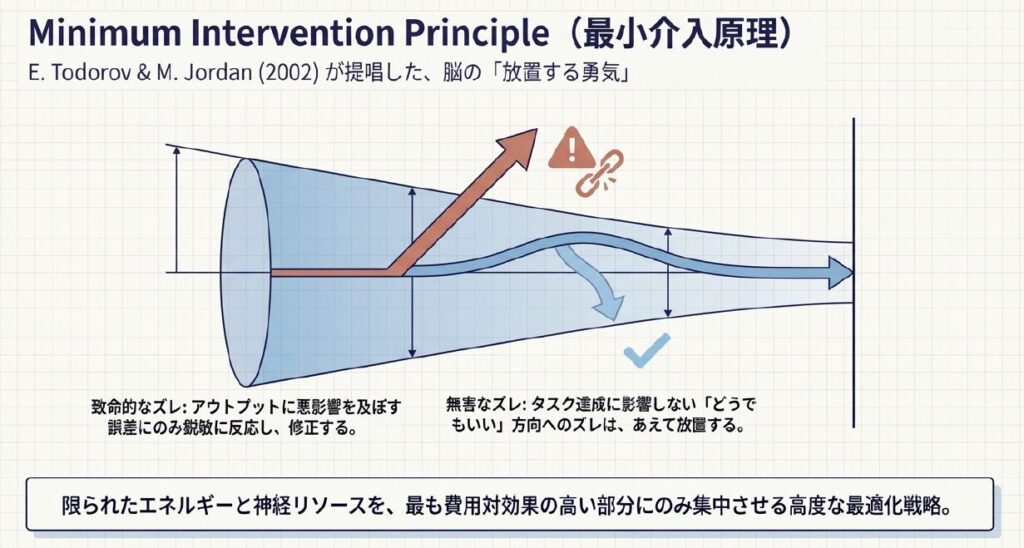
エマニュエル・トドロフとマイケル・ジョーダンが二〇〇二年に発表した記念碑的な論文は、この現象を「Minimum Intervention Principle(最小介入原理)」という言葉で鮮やかに説明しました。彼らの主張によれば、脳はすべての誤差を修正しようとはしません。タスクの成否に直結する誤差、つまり「アウトプット」に悪影響を及ぼすズレに対してのみ、鋭敏に反応して修正を加えます。
一方で、タスクの達成に影響を与えない、いわば「どうでもいい」方向へのズレについては、あえて修正せずに放置するのです。これは限られたエネルギーと神経リソースを、最も費用対効果の高い部分に集中させるという、極めて高度な最適化戦略に他なりません。
この「放置する勇気」こそが、人間の動きのしなやかさを生み出しています。例えば、ダーツを投げる動作を想像してみてください。手首の角度がわずかにズレたとしても、肘の伸びや肩の回転でそのズレを相殺できれば、矢は狙った場所へ飛びます。もし脳が「あらかじめ決めた通りの手首の角度」を頑なに守ろうとすれば、その修正のために余計なエネルギーを消費し、かえって動きが硬くなってしまうでしょう。
OFC(最適フィードバック制御)の枠組みでは、内部的な自由度の揺らぎは「ノイズ」ではなく、タスクを完遂するための「余裕」として活用されます。これは「Motor Abundance(運動の豊富さ)」という概念、あるいはUncontrolled Manifold(UCM:非制御多様体)解析といった手法とも見事に合致する、科学的に非常に整合性の高い視点です。

では、脳はどのようにして「修正すべき誤差」と「放置してよい誤差」を見極めているのでしょうか。ここで登場するのが、状態推定と内部モデルの存在です。私たちの脳内には、自分の身体が現在どのような状態にあり、どのような指令を出せば次にどう動くかをシミュレーションする「順モデル」が存在すると考えられています。運動コマンドを筋肉に送る際、脳はそのコピー(エフェレンス・コピー)を順モデルに送り、未来の感覚フィードバックを予測します。そして、実際に感覚器官から戻ってきた情報と、この予測値との間に生じた「予測誤差」を最小化するように制御を更新していくのです。
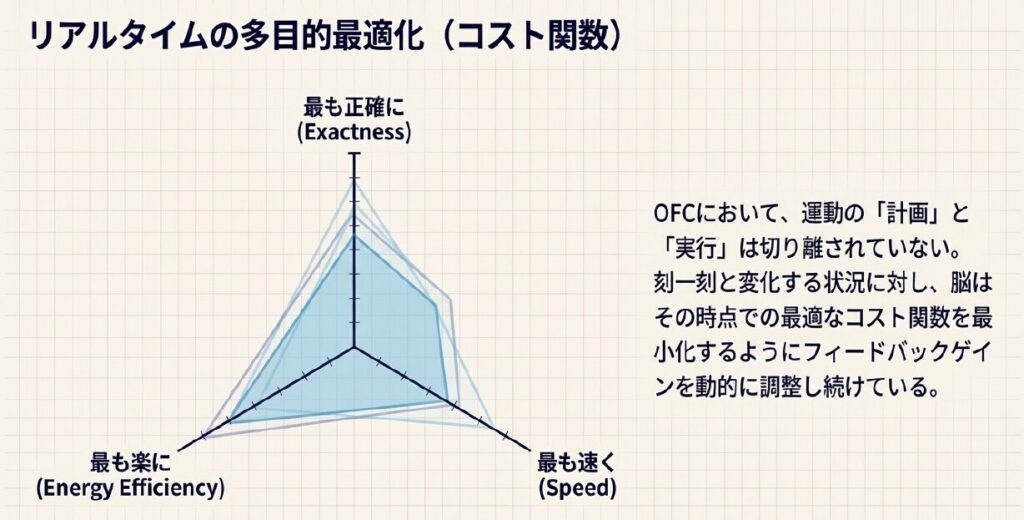
興味深いのは、このプロセスがリアルタイムかつオンラインで行われている点です。OFCにおいては、運動の「計画」と「実行」は厳密に切り離されたフェーズではありません。運動が進むにつれて刻一刻と変化する状況に対し、その時点での最適なコスト関数を最小化するように、フィードバックゲインが動的に調整されます。このコスト関数には、目的地の誤差だけでなく、エネルギー消費量や、あるいは運動にかかる時間そのものも含まれます。つまり、脳は常に「最も楽に、最も正確に、最も速く」という多目的最適化問題を解き続けていると言えるでしょう。
この予測誤差最小化というビューは、近年話題の自由エネルギー原理とも深い親和性を持っています。私たちは世界をありのままに捉えているのではなく、常に自分の予測というフィルターを通して世界を解釈し、そのズレを修正することで自己の存在を維持しています。運動制御におけるOFCは、いわばこの壮大な生命維持システムの、物理的なアウトプットを担う最前線のモジュールなのです。タスクのゴールさえ守られていれば、途中のプロセスはある程度の曖昧さを許容する。このアウトプットドリブンな性質は、私たちが未知の環境に適応し、新しいスキルを習得する際の驚異的な柔軟性の源泉となっています。

海外の最新の研究では、このOFCの枠組みをロボティクスやリハビリテーションに応用する試みが加速しています。従来のロボットが「ガチガチのプログラム」で制御されていたのに対し、人間に近い柔軟な動きを実現するためには、この最小介入原理を取り入れることが不可欠だと認識され始めているからです。もし、すべての関節をミリ単位で制御しようとすれば計算負荷は爆発しますが、「末端の軌道さえ合っていれば良い」という割り切りをシステムに組み込むことで、より生物らしい、効率的でタフな動きが可能になります。
Optimal Feedback Controlが私たちに教えてくれるのは、人間の「不完全さ」の中に宿る美学です。動作が毎回異なること、つまり「再現性の欠如」は、決してエラーではありません。それは、常に変化する環境と自分の身体状態の中で、最も合理的な解を導き出した結果なのです。完璧な軌道をなぞる機械的な正確さよりも、多少の揺らぎを許容しながらも確実に目的を達成する強靭さ。それこそが、数億年の進化を経て私たちが手に入れた、知性ある運動の正体と言えるでしょう。
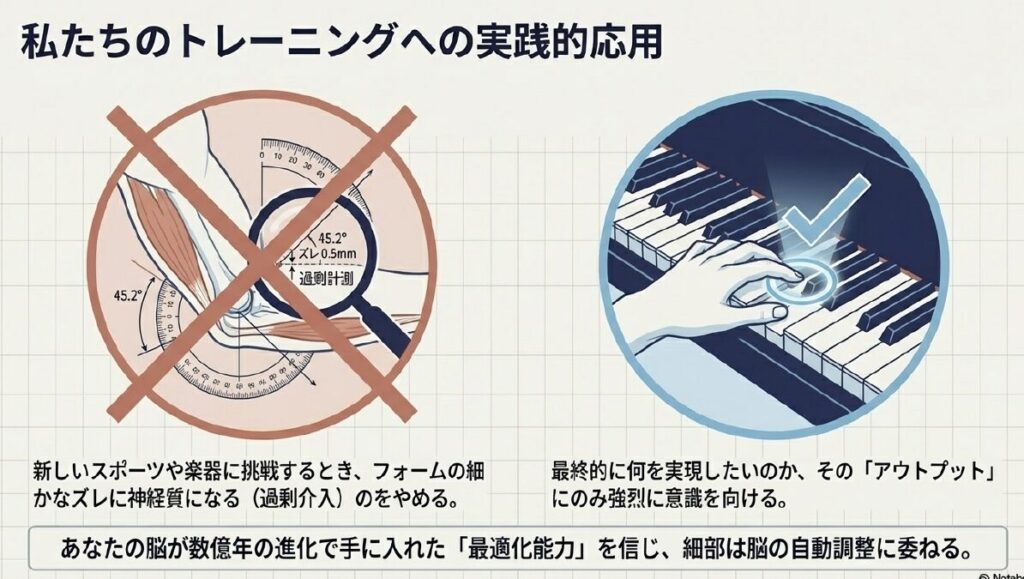
もし、あなたがこれから何か新しいスポーツや楽器に挑戦するのであれば、この「最小介入原理」を思い出してみてください。フォームの細かなズレに神経質になるよりも、最終的に何を実現したいのか、その「アウトプット」に意識を向けること。それこそが、あなたの脳が本来持っている、最適化能力を最大限に引き出す近道かもしれません。