
姿勢を安定させるシステムが織りなす自動姿勢反応
姿勢を安定させる姿勢安定性は、安定性の限界(LOS:Limits of Stability)内において支持基底面(BOS:Base of Support)内の身体重心(COG:Center of Gravity)を維持する能力と定義されます。
身体重心が支持基底面内にある時、身体は安定し身体重心と支持基底面のアライメントが失われた時、姿勢安定性は減少します。
姿勢安定性は、末梢神経系と中枢神経系からの情報の入力と処理、そして出力の結果である。
姿勢安定性は、末梢神経系と中枢神経系からの情報の入力と処理、そして出力の結果です。
特に姿勢安定性に関わる情報には、視覚系情報、前庭系情報、体性感覚系情報があります。
視覚系は、周辺環境と水平線に対する目の関係の情報を提供しています。
前庭系は、移動する支持基底面からのフィードバックを提供するとともに、頭部と身体の位置情報を提供しています。
体性感覚系は、固有感覚、温度感覚、疼痛を含む末梢からのすべての入力を包含しています。
また、注意と認識も姿勢安定性に影響を及ぼす可能性があると言われています。
姿勢安定性を維持する運動システムの反応は、自動姿勢反応として起こる。
姿勢安定性は体性感覚入力の処理に認知を必要とするため、認知を利用するどのような付加的な過程も、人が姿勢安定性を維持する能力を変えさせる可能性があります。
この情報のすべてが、姿勢安定性を維持するための運動出力命令を作成するため、中枢神経系で評価されて処理されます。
この全過程はループとなって絶えず、自動的に生じています。

この姿勢安定性を維持する運動システムの反応は、自動姿勢反応として起こります。
これらの反応は皮質下レベル、主に小脳で仲介されます。
これらの自動姿勢反応は足関節制御、股関節制御、ステップ制御という3つの特徴的なバランス戦略に分けられます。
これらの3つの制御は、身体重心と支持基底面のアライメントを回復するために漸次活動しています。
自動姿勢反応の3つの特徴的なバランス戦略
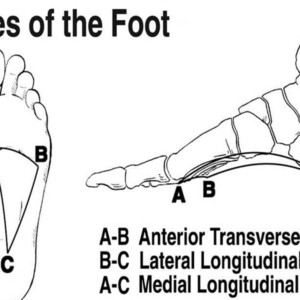
●足関節制御
足関節は、姿勢修正において中心的役割を果たしています。
身体重心のわずかな変化は、足関節で支持基底面上の身体重心の位置を変えることによって修正できます。
一般的にこの制御、柔らかい素材のパッドのような不安定な支持基底面上に人が立っている時に起こります。
この修正は遠位から近位へ向かって起こり、頭部と股関節は同期して動きます。
また、この反応は逆さ振り子(Inverted Pendulum)として知られています。
●股関節制御
身体重心の大きな変化は、股関節での多分節制御で修正されます。
この修正は近位から遠位へ生じ、頭部と股関節は同時に動きません。
この制御は、小さな支持基底面上に立っているときに用いられます。
●ステップ
足関節制御または股関節制御で実際の身体重心の位置を変えることができない時に一歩踏みだすことにより、身体の重心の身体重心の下の支持基底面の位置を変えます。








この記事へのコメントはありません。